
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Steppor Motors နှင့် servos နှင့် servo motors တို့၏ခြားနားချက်ကိုနားလည်ရန်ဆောင်းပါးတစ်ပုဒ်
1. stepper မော်တာများနှင့် servos နှင့် servo motors အကြားကွဲပြားခြားနားမှု
Stepurger Motor: Open-loop control element element element element element element element angular angular ပြောင်းရွှေ့ခြင်း (သို့) လိုင်းရွှေ့ပြောင်းခြင်းကိုလိုင်းရွှေ့ပြောင်းခြင်းသို့မဟုတ်လိုင်းရွှေ့ပြောင်းခြင်းကို signal) ဖြစ်သည်။ ရိုးရိုးရှင်းရှင်းပြောရလျှင်၎င်းသည်ထောင့်နှင့်အလှည့်အရေအတွက်ကိုထိန်းချုပ်ရန်လျှပ်စစ်သွေးခုန်နှုန်း signal ကိုမူတည်သည်။ ဒါကြောင့်သူဟာဘယ်လောက်လည်ပတ်သလဲဆိုတာကိုဆုံးဖြတ်ဖို့သွေးခုန်နှုန်း signal ကိုသာအားကိုးတယ်။ အာရုံခံကိရိယာမရှိသည့်အတွက်ရပ်တန့်ထောင့်သည်သွေဖည်သွားနိုင်သည်။ သို့သော်တိကျသော pulse signal သည်သွေဖည်မှုကိုလျော့နည်းစေသည်။
Servo Motor - အလှည့်နေရာကိုထိန်းချုပ်ရန် Sensor မှတစ်ဆင့်မော်တာအမြန်နှုန်းကိုထိန်းချုပ်ရန် servo control circuit ကိုမှီခိုပါ။ ဒီတော့ရာထူးထိန်းချုပ်မှုကအရမ်းတိကျတယ်။ နှင့်လှည့်မြန်နှုန်းသည်လည်း variable ကိုဖြစ်ပါတယ်။
Servo (Electronic Servo) - servo ၏အဓိကအစိတ်အပိုင်းမှာ servo motor ဖြစ်သည်။ ၎င်းတွင် servo motor control control circuit + လျှော့ချရေးကိရိယာများပါ 0 င်သည်။ အိုး, servo motor သည်လျှော့ချရေးကိရိယာများမတင်ပါ။ ထိုအခါ servo တစ် ဦး လျှော့ချဂီယာ set ကိုရှိပါတယ်။
ကန့်သတ် 0 န်ဆောင်မှုတစ်ခုအနေဖြင့်, Servo signal control သည် pulse width modulath signal (pwm) signal (pwm) signal (pwm) signal ကိုဖြစ်သည်။
2 ။ Stepper Motor အခြေခံနိယာမ
ဘယ်လိုအလုပ်လုပ်လဲ:
ပုံမှန်အားဖြင့်မော်တာ၏ရင်းမြစ်သည်အမြဲတမ်းသံလိုက်တစ်ခုဖြစ်သည်။ ဤသံလိုက်စက်ကွင်းသည်ရဟတ်ကိုထောင့်တစ်ခုသို့လှည့်ရန်မောင်းနှင်လိမ့်မည်။ အဆိုပါ stator ၏ vector သံလိုက်စက်ကွင်းတစ်ခုထောင့်အားဖြင့်လှည့်အခါ။ အဆိုပါရဟတ်သည်ဤသံလိုက်စက်ကွင်းနှင့်အတူထောင့်အားဖြင့်လှည့်။ Inputical Pulse တစ်ခုစီအတွက်မော်တာသည်တစ် ဦး angular ခြေလှမ်းတစ်လှမ်းလှမ်းလှည့်ပတ်။ ၎င်း၏ output angular နေရာရွှေ့ပြောင်းခံရအချိုးကျပဲပဲမျိုးစုံများအရေအတွက်နှင့်အချိုးကျသည်နှင့်၎င်း၏အလှည့်အပြောင်းမြန်နှုန်းသည်ပဲမျိုးစုံ၏ကြိမ်နှုန်းနှင့်အချိုးကျသည်။ အစဉ်အလာကိုအားစိုက်ထုတ်သည့်အမိန့်ကိုပြောင်းလဲခြင်းအားဖြင့်မော်တာပြောင်းပြန်ဖြစ်သွားသည်။ ထို့ကြောင့်ပဲမျိုးစုံအရေအတွက်နှင့်ကြိမ်နှုန်းနှင့်မော်တာ၏အဆင့်၏အဆင့်၏အကောက်အပိုးများကိုအားဖြည့်ခြင်းအမိန့်ကို stepper မော်တာ၏အလှည့်ကိုထိန်းချုပ်ရန်ထိန်းချုပ်နိုင်သည်။
အပူထုတ်လုပ်မှု၏နိယာမ:
များသောအားဖြင့်မော်တာအမျိုးမျိုးကိုကြည့်ရှုခြင်း, အတွင်းပိုင်းသည်သံအမာခံနှင့်အကွေ့အကောက်များသောကွိုင်များဖြစ်သည်။ 0 င်ရောက်ခြင်းသည်အရှုံးပေါ်ခြင်းနှင့်ခုခံခြင်းနှင့်လက်ရှိအချိန်တွင်ကြေးနီဆုံးရှုံးမှုအဖြစ်မကြာခဏရည်ညွှန်းလေ့ရှိသောစတုရန်းမုန်တိုင်းဖြစ်သည့်စတုရန်းမုန်တိုင်းဖြစ်သည့်စတုရန်းမုန်တိုင်းဖြစ်သည့်စတုရန်းအနှောက်အယှက်ဖြစ်စေသည်။ Core သည် Hysteresis Eddy လက်ရှိအကျိုးသက်ရောက်မှုရှိကြောင်းသံလိုက်စက်ကွင်းတွင်သံလိုက်ဆုံးရှုံးမှုဟုခေါ်သောပစ္စည်း, လက်ရှိ, ကြေးနီဆုံးရှုံးမှုနှင့်သံဆုံးရှုံးမှုကိုအပူထုတ်လုပ်မှုပုံစံဖြင့်ပြသခြင်းကိုပြုလုပ်လိမ့်မည်။ ထို့ကြောင့်မော်တာ၏ထိရောက်မှုကိုထိခိုက်စေသည်။ အရှိန်အဟုန်မြှင့်တင်ခြင်းသည်ယေဘုယျအားဖြင့် positioning attack and torque output ကိုလိုက်ရှာခြင်း, စွမ်းဆောင်ရည်နိမ့်သည်, လက်ရှိအခြေအနေနှင့်ပြောင်းလဲခြင်းသည်အလွန်မြင့်မားသော,
iii ။ တက်ဆောက်လုပ်ရေး
အဆိုပါ servo ကိုအဓိကအားဖြင့်အိမ်ရာ, တိုက်နယ်ဘုတ်, မောင်းနှင်မော်တာ, ဂီယာဓာတ်ဆီနှင့်အနေအထားရှာဖွေတွေ့ရှိဒြပ်စင်နှင့်အတူအဓိကအားဖြင့်ဖွဲ့စည်းထားသည်။ ၎င်း၏လုပ်ငန်းမူသည်လက်ခံသူသည် servo သို့ signal တစ်ခုပို့ပေးခြင်းဖြစ်ပြီးတိုက်နယ်ဘုတ်တွင် IC သည် Corrated Mote ကိုစတင်လည်ပတ်နိုင်ပြီး၎င်းအား STERATIONRE ကို ဖြတ်. SEXIRM သို့ကူးစက်သည်။ ရာထူး detector တကယ်တော့ variable variable resistor ဖြစ်ပါတယ်။ အဆိုပါ servo လှည့်လာသောအခါ Reversor တန်ဖိုးပြောင်းလဲသွားလိမ့်မည်နှင့်လည်ပတ်၏ထောင့်ထောင့်ကို resistor value ကိုရှာဖွေတွေ့ရှိခြင်းဖြင့်သိနိုင်သည်။ General Servo Motor သည် The The There There Role-Thy Poir Roable တွင်ပင့်ကတ်ပြားသည်သံလိုက်ကြိုးတစ်ချောင်းဖြင့်လှည့်ပတ်နေသောသံလိုက်စက်ကွင်းတစ်ခုဖွင့ ်. ရဟတ်သံလိုက်၏အစွန်အဖျားတွင်လှည့ ်. လှုပ်ခြင်းများထုတ်လုပ်ရန်အစွန်အဖျားကိုထုတ်ပေးသည်။ ရူပဗေဒအရအရာဝတ်ထုတစ်ခု၏ inertia ၏ယခုအချိန်တွင်၎င်းသည်၎င်း၏ဒြပ်ထုနှင့်တိုက်ရိုက်အချိုးကျသည်။ မြန်ဆန်သောလည်ပတ်မှုမြန်နှုန်းနှင့်စွမ်းအင်သုံးစွဲမှုနိမ့်ကျရန် servo သည်အလွန်ပါးလွှာသောဆွန်းဆလင်ဒါနှင့်အတူအလွန်ပေါ့ပါးသောဆွန်း rotor တစ်ခုဖြင့်ပြုလုပ်ထားပြီး,
ကွဲပြားခြားနားသောလုပ်ငန်းခွင်ပတ် 0 န်းကျင်နှင့်ကိုက်ညီစေရန်ရေစိုခံခြင်းနှင့် dustproof ဒီဇိုင်းများနှင့်အတူ servos ရှိပါတယ်; ကွဲပြားခြားနားသောဝန်လိုအပ်ချက်များအားတုန့်ပြန်မှုတွင်ပလတ်စတစ်နှင့်သတ္တုဂီယာများအတွက်ပလတ်စတစ်နှင့်သတ္တုဂီယာများရှိသည်။ အဆင့်မြင့် servos သည်အလှည့်ကျကိုပိုမိုမြန်ဆန်စေရန်နှင့်ပိုမိုတိကျမှန်ကန်စေရန်ဘောလုံးဝက်ဝံတပ်ဆင်ထားမည်ဖြစ်သည်။ Ball Beating တစ်ခုနှင့်ဘောလုံးဝက်ဝံနှစ်မျိုးစပ်ကြားအကြားခြားနားချက်ရှိသည်။ အသစ်သော FET servos အသစ်သည်အဓိကအားဖြင့် FET (Field Effector Transistor) ကို အသုံးပြု. အတွင်းခံနိုင်ရည်နည်းပါးခြင်းနှင့်ပုံမှန်ဖြတ်သန်းသူများထက်လက်ရှိဆုံးရှုံးမှုနည်းပါးသည်။
IV ။ စစ်ဆင်ရေး၏ servo နိယာမ
Pwm Wave မှ Internal circuit သို့ internal circuit သို့ bias voltage တစ်ခုသို့ထုတ်လုပ်ရန် The Potinime Concerner သည်သုညခြားနားချက်သည်သုညဖြစ်သည့်အတွက်မော်တာမှတ်တိုင်များကိုအောင်မြင်ရန်မော်တာမှတ်တိုင်များဖြစ်သည်။
Servo Pwms အတွက် protocols များသည်အတူတူပင်ဖြစ်သည်။ သို့သော်နောက်ဆုံးပေါ် servos များသည်ကွဲပြားနိုင်သည်။
Protocol သည်ယေဘုယျအားဖြင့်မြင့်မားသော levic ကို 0.5ms 0.5ms ~ 2.5ms တွင်ကွဲပြားခြားနားသောထောင့်များမှဖြတ်သန်းရန် servo ကိုထိန်းချုပ်ရန်အဆင့်မြင့်အကျယ်အ 0 န်းရှိသည်။
v. servo motors အလုပ်လုပ်ပုံ
အောက်ဖော်ပြပါပုံသည် Power လည်ပတ်နေသောအသံချဲ့စက်ပါ 0 င်သော servo motor control circuit ကိုပြသပြီးမော်တာသည် DC servo motor ဖြစ်သည်။ ကိန်းဂဏန်းမှကြည့်ရှုနိုင်သည့်အတိုင်း Power Intervational Amplifier LM675 ကို 15V မှဖြန့်ဖြူးပေးပြီး 15V voltage ကို RP 175 ၏ Inplime lm675 ၏ inple ကိုထည့်သွင်းထားသည်။ မော်တာသည်အမြန်နှုန်းကိုအချိန်နှင့်တပြေးညီစစ်ဆေးခြင်းအတွက်မြန်နှုန်းတိုင်းတာမှုအချက်ပြမီးစက်တပ်ဆင်ထားသည်။ စင်စစ်အားဖြင့်မြန်နှုန်း signal generator သည်မီးစက်ထုတ်လုပ်သူဖြစ်ပြီး၎င်း၏ output output ကိုဗို့အားအလှည့်အပြောင်းအမြန်နှုန်းနှင့်အချိုးကျသည်။ အမြန်နှုန်းကိုတိုင်းတာသည့် signal generator G မှ voltage output protplate amplifier ၏ inpliper amplifier ၏ inverting inplifier ၏ inverting inplate ကို inverting inputs ထဲသို့ပြန်သွင်းထားခြင်းဖြစ်သည်။ အမြန်ဆုံး command potentiometer RP1 မှသတ်မှတ်ထားသည့် voltage တန်ဖိုးကို R1.r.2 နှင့်ညီမျှပြီးနောက် R1.r.2 ပြီးနောက် r1.r.1 ပြီးနောက်လုပ်ငန်းလည်ပတ်မှုအသံချဲ့စက်၏ phise amplplication ၏ inplactier input ကိုထည့်သွင်းထားသည်။
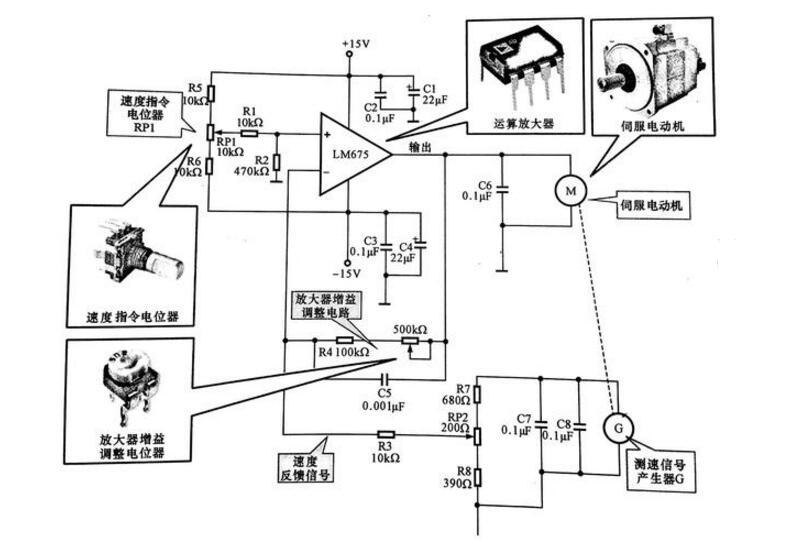
servo မော်တာ၏စီမံခန့်ခွဲမှု
SERSMOMOTOR - servomotor အတွက်အက်ခရာ M ကိုညွှန်ပြသည့်အနေဖြင့်၎င်းသည် drive system အတွက်အာဏာအရင်းအမြစ်ဖြစ်သည်။ Operational Amplifier: Circuit name အားဖြင့် I.E. , LM675 သည် servo motor အတွက် drive current ကိုပေးသော servo control circuit တွင်အသံချဲ့စက်တစ်ခု၏အသံချဲ့စက်တစ်ခုဖြစ်ပါတယ်။
မြန်နှုန်း command potentiometer RP1: circuit setting တွင် circuit တွင်လည်ပတ်နေသောအသံချဲ့စက်၏ရည်ညွှန်းဗို့အားသတ်မှတ်သည်။ Amplifier Gain Adjustment Potentiometer RP2: အသံချဲ့စက်အမြတ်နှင့်မြန်နှုန်းတုံ့ပြန်ချက်အချက်ပြမှုအရွယ်အစားကိုညှိရန်တိုက်နယ်တွင်အသုံးပြုသည်။
မော်တာများ၏ 0 န်ဆောင်မှုများ 0 န်ဆောင်မှုသည်အပြောင်းအလဲများတိုးပွားလာသော intplipier ၏ invertation amplifier ကိုတိုးပွားလာသည်။ i.E. ၏ 0 န်ဆောင်မှုတော်ချဲ့စက်၏ invertage adplifier ၏ invertage adplifier ၏ outporce applifier ၏ outporce adplifier ၏ outporce adplifier ၏ outporce adplifier ၏ outporce adplifier ၏ outporce inplifier ၏ output ကိုထုတ်ပေးသည့်အကြားရှိဗို့အားကျဆင်းသွားသည်။ တိုး။ အပြန်အလှန်အားဖြင့်ဝန်သည်သေးငယ်လာပြီးမော်တာအမြန်နှုန်းတိုးလာသည့်အခါအမြန်နှုန်းချဲ့ထွင်မှု၏ invertage voltage ၏ output ကို voltage ၏ output ကို voltage ၏ outporce voltage ၏ outporate voltage များတိုးပွားလာသည်။
စုံစမ်းမေးမြန်းရန်ပေးပို့ပါ။


X
သင့်အား ပိုမိုကောင်းမွန်သောကြည့်ရှုမှုအတွေ့အကြုံကို ပေးဆောင်ရန်၊ ဆိုက်အသွားအလာကို ပိုင်းခြားစိတ်ဖြာပြီး အကြောင်းအရာကို ပုဂ္ဂိုလ်ရေးသီးသန့်ပြုလုပ်ရန် ကျွန်ုပ်တို့သည် ကွတ်ကီးများကို အသုံးပြုပါသည်။ ဤဆိုက်ကိုအသုံးပြုခြင်းဖြင့် ကျွန်ုပ်တို့၏ cookies အသုံးပြုမှုကို သင်သဘောတူပါသည်။
ကိုယ်ရေးအချက်အလက်မူဝါဒ